![[Live from Earth and Mars]](http://www-k12.atmos.washington.edu/k12/graphics/xmars_map.gif.pagespeed.ic.Bwqa4QZhmw.png)

Artist's concept of lander and microrover on Mars
The Mars Pathfinder Mission is the second launch in the Discovery Program, a NASA initiative for small planetary missions with a maximum three year development cycle and a cost cap of $150M (FY92) for development. The Mars Pathfinder Project is managed for NASA by the Jet Propulsion Laboratory, California Institute of Technology, Pasadena, California.
The mission was conceived primarily as an engineering demonstration of key technologies and concepts for future landed science missions: during its rapid development, science has been greatly enhanced within the original cost constraint. The instruments delivered to the surface of Mars investigate the structure of the Martian atmosphere and surface meteorology, surface geology, form, and structure, and the elemental composition of Martian rocks and soil. A free-ranging surface rover is deployed to conduct technology experiments and to serve as an instrument deployment mechanism.
This description was developed from the NASA "Proposal Information Package", consisting of Project and Investigator documents and links, updated during and subesquent to the 10th Project Science Group meeting, JPL, Feb 5-7, 1997, with the assistance of Project Staff and Science team members. The project home page can be found at the NASA JPL Mars Pathfinder site.
The flight system was launched on a Delta II-7925 launch vehicle which includes a Payload Assist Module (PAM)-D upper stage, from the Cape Canaveral Air Force Station, December 4, 1996.
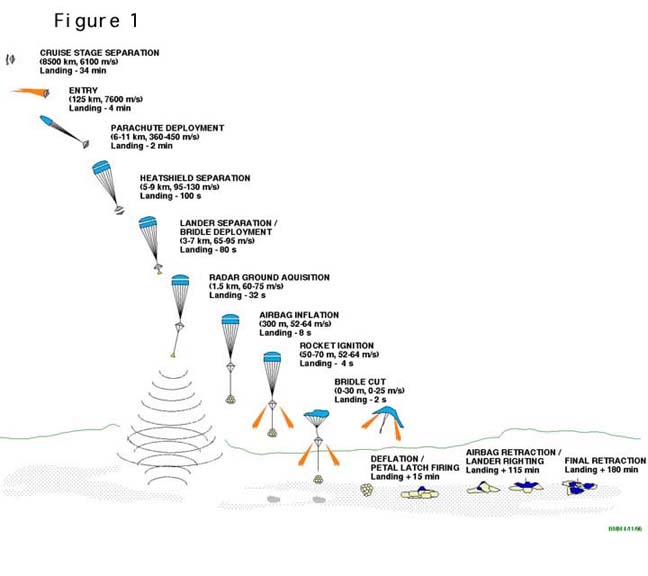
After launch, the spacecraft requires 7 months to reach Mars. During this phase, a series of four Trajectory Correction Maneuvers (TCMs) are performed, in order fine tune the flight path. Tracking, telemetry, and command operations with the spacecraft are conducted using the giant dish antennas of the NASA/JPL Deep Space Network (DSN). Upon arrival at Mars on July 4, 1997, the cruise stage is jettisoned and the spacecraft properly orients itself for atmospheric entry (entry angle is 14.2° from horizontal) at a velocity of 7.65 km/s. The spacecraft then enters the Martian atmosphere, and deploys the parachute, rocket braking system, and air bag system for a soft, upright landing.
The lander enters the atmosphere behind the aeroshell which slows the vehicle (peak deceleration at about 20 g's at 30 km altitude). The aeroshell is jettisoned just prior to parachute deployment (at mach 1.8 at about 6-10 km altitude). During descent on the parachute at a terminal velocity about 65 m/s, the lander is lowered beneath the back cover on a 20 m long bridle. Signals from a radar altimeter, mounted in one of three triangular openings at the base of the lander, are used to initiate the firing of three small solid tractor rockets at about 50 m above the surface, reducing the vertical component of velocity to near zero. Large six-lobed airbags inflate around each face of the lander and the bridle is cut prior to final rocket burn, insuring that the parachute and back cover are carried away. The airbags, which provide about 0.5 meters of energy absorbing stroke, are not vented during landing. Peak decelerations of 40 g's will be experienced as the lander makes several bounces before coming to rest.
Accelerometers signal that the lander has come to rest, at which time interior, filtered, peal-away patches vent the airbags, with minimal surface contamination. The lander accelerometers determine which petal is down and automatically initiate the lander deployment sequence in which the upper airbags retract (internal tendons pull the airbags close to the petals) and the petals open in the proper sequence to assure an upright configuration. In addition, all engineering and science data obtained during the entry, descent, and landing phase are recorded for playback at the initiation of lander surface operations. The duration of the entry phase is approximately 5 minutes. Landing occurs in darkness, very early in the morning at about 3 am local Mars time, just after Earth rise. Opening of the lander takes a few hours before the spacecraft can be commanded from the earth (about 7 am local Mars time).
The events to be accomplished on the landing sol are to achieve an upright landed configuration, to return the recorded entry science and engineering data, to establish a high rate telecommunications link, to acquire and return a panoramic image of part of the surrounding terrain, to deploy the meteorology mast, and to drive the rover off its petal. Constraints on the operation of the lander during this period include limited power (the batteries have been partially depleted by the entry descent and landing operations), limited telemetry capability, and the need for flight controllers on Earth to verify key events before proceeding with subsequent operations. Surface operations for the remainder of the mission are focused on extensive use of the rover and science instruments. The rover will explore a region within ten or a few tens of meters from the lander during the first week of the rover mission After that time the rover may be commanded to acquire APXS spectra from magnetic targets on the rover ramps and to explore regions of the surface up to 500 meters from the lander (the approximate limit of its communication range).
Mars Pathfinder will land in Ares Vallis, Chryse Planitia (19.5°N, 32.8°W), within a 100 km by 200 km error ellipse determined by navigational uncertainties during cruise and variable atmospheric entry conditions. This site lies near the mouth of the catastrophic outflow channels Ares Vallis (and Tiu Vallis), which drained from the highlands to the south. Selection of this site was made after an exhaustive search and selection process involving engineering analyses of site safety and an assessment of the science potential of the several candidate sites. Landing at this site may permit sampling a diversity of rock types that make up the ancient cratered terrain on Mars (some of which may reflect primary differentiation and early evolution of the crust), the ridged plains and a variety of reworked channel materials (reflecting later crustal evolution and the development of weathering products). Even though the exact provenance of the samples would not be known, data from subsequent orbital remote sensing missions could then be used to infer the provenance for the "ground truth samples studied by Pathfinder.
Lander
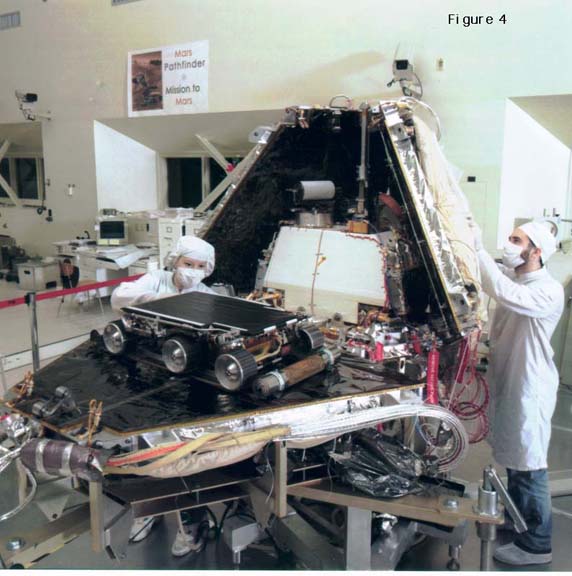
The lander (250 kg mass) is a tetrahedron shaped structure containing
the science instruments, rover, and all electronic and mechanical
devices required to operate on the surface of Mars (Figure 4). The tetrahedron
consists of three, similarly-shaped, 1 m triangular panels attached to
a central base panel. The meteorology mast is the very thin, white
line slightly to the left of the right panel where the technician is
working. All lander equipment except the solar arrays, rover and
meteorology mast are attached to a single center panel. The other
three panels are attached to the edges of the center panel by
actuators that are used to right the lander after touchdown. This
active self-righting mechanism is needed because of the passive nature
of the Pathfinder deceleration subsystems. All thermally sensitive
electronics are contained in an insulated enclosure on the center
panel. Specific hardware components inside this enclosure include a
high performance central computer that controls the spacecraft during
cruise, entry, descent, landing and surface operations (a 32 bit,
radiation-hardened work station-RAD 6000 with roughly a gigabit of
memory, programmable in C with a VxWorks operating system), a Cassini
heritage transponder, a solid state power amplifier for
telecommunications, and a high capacity rechargeable battery (40
amp-hr). Hardware outside the thermal enclosure includes a steerable
high gain X-band antenna capable of approximately 5.5 kilobits per
second into a 70 m Deep Space Network antenna and solar arrays
(3.3m2 gallium
arsenide array generating 1100 W-hr/day) capable of providing enough
power to transmit for 2-4 hours per sol and maintain 128 megabytes of
dynamic memory through the night. The lander is designed to survive
for a minimum of 30 sols, with an extended mission lifetime of up to a
year.
A comprehensive description of the Rover program is provided by the above link.
The Mars Pathfinder rover (named Sojourner) is a six wheel drive rocker bogie design vehicle, which is 65 cm long by 48 cm wide by 30 cm high (Figure 5). Total mass of the rover is about 10.5 kg (including payload), lander-mounted support equipment is an additional 5.5 kg. The rocker bogie chassis has demonstrated remarkable mobility, including the ability to climb obstacles that are a full wheel diameter in height and the capability of turning in place. The vehicle communicates through the lander via a UHF antenna link and is intended to operate entirely within view of the lander cameras, or within a few tens of meters of the lander (extended mission traverses up to 500 m from the lander are possible, limited by the UHF link). It is a solar powered vehicle, generating 16 W peak power, with a (non-rechargeable) primary battery back-up (~300 W-hr). The rover moves at 0.4 m/min, and carries 1.5 kg of payload. The payload consists of the APXS, its deployment mechanism and the material adherence and wheel abrasion experiments. In addition, the rover has monochrome stereo forward cameras for hazard detection and terrain imaging, and a single rear color camera.
The alpha proton x-ray spectrometer (APXS) is mounted on a
deployment device on the rear of the vehicle (Figure 5) that enables placing the
APXS sensor head up against both rocks and soil in a continuum of
orientations (from horizontal on the ground to vertical rock faces at
rover height). The rear facing camera will image the APXS measurement
sites at slightly better than 1 mm per pixel resolution. The rover
control system includes a variety of autonomous hazard detection
systems for safing the vehicle in potentially hazardous situations
(forward laser light stripers for detecting obstacles or crevasses,
potentiometers for detecting bogie tilts).
The rover will also perform a number of technology
experiments designed to provide information that will improve future
planetary rovers. These experiments include: terrain geometry
reconstruction from lander/rover imagery; basic soil mechanics by
imaging wheel tracks and wheel sinkage; dead reckoning, path
reconstruction and vision sensor performance; vehicle performance;
rover thermal characterization; UHF link effectiveness; material
abrasion by sensing abrasion of different thicknesses of paint on a
rover wheel; and material adherence by measuring dust accumulation on
a reference solar cell with a removable cover and by directly
measuring the mass of the accumulated dust on a quartz crystal
microbalance.
This Mars Pathfinder Instrument description serves as the primary project document. The scientific goals of the Imager for Mars Pathfinder were developed as an integral part of the instrument and those of the Alpha-Proton-X-Ray Spectrometer were developed in conjunction with the Rover program. As there was no Atmospheric Structures/Meteorology proposal, its goals were developed by the ASI/MET Science Advisory Team and the project. Information from this and associated documents are provided below.
IMAGER FOR MARS PATHFINDER
(IMP)
Principal Investigator
Goals of the Investigation
These
scientific goals and planned investigations have been abstracted from
other documents as provided below. The major science objectives of
the IMP experiment include. (1) mapping the morphology and terrain of
the landing site. (2) Determination of the mineralogy of the exposed
crustal rocks and soil as well as the mineralogy of the weathering
products in the soil, dust, and on the surface of the rocks. (3)
Observation of time-variable phenomena at the landing site including
cloud formation, wind velocity and direction, frost, and the
formation/evolution of eolian features. (4) Observation of the
properties of the martian atmosphere including measurement of the
quantity of atmospheric water vapor and the quantity and size
distribution of atmospheric dust. (5) Study the magnetic properties of
the martian dust by multispectral imaging of dust accumulations on the
magnetic arrays. (6) Multispectral studies of the nighttime martian
atmosphere by imaging bright stars and the multispectral study of the
mineralogy of the martian moons Phobos and Deimos.
Investigations Planned by the IMP Team
Geomorphology, Photoclinometry, and Topography:: Panoramas
of the landing site will be taken both before and after the camera
mast deployment. These images will map the landing site for rover
operations, as well as study the large-and small-scale structure of
the landing site, rock and dune features, and any erosional
features. Stereo ranging will determine the topography of the landing
site and support rover operations. Images of the same areas taken at
different solar elevation angels will permit topographic analysis by
shadow length and photoclinometry. Additional images will be taken to
study the nature of the martian soil. This will include imaging the
rover wheel tracks to determine soil strength and compaction
properties. Observations of the calibration targets and the lander
surfaces will measure the rate of dust outfall.
Geology and Mineralogy: Filter-wheel spectral mapping
using 12 filter wavelengths spanning 0.45 to 1.0 mm will determine the compositional variation of
the landing site and identify mineralogical units as targets for
further investigation using the rover-based Alpha/Proton/X-ray
Spectrometer. Spectral mapping will also study weathering processes
and products in the dust, soil, and rock. Of particular interest is
the possibility of a "grab-bag" of mineralogies at
the Ares Vallis landing site. This site was chosen in a catastrophic
outwash area to explore the possibility that a range of mineralogies,
including ancient martian highlands materials, were deposited in this
area by the flood event(s). Nighttime multispectral observations of
Phobos and Deimos can enhance the limited spectral data available on
these small moons. The IMP should be able to detect bright (0 visual
magnitude) stars and use these objects as standards for removal of the
atmospheric signature from the Phobos and Deimos observations. These
observation can also be used for the nighttime study of the martian
atmosphere.
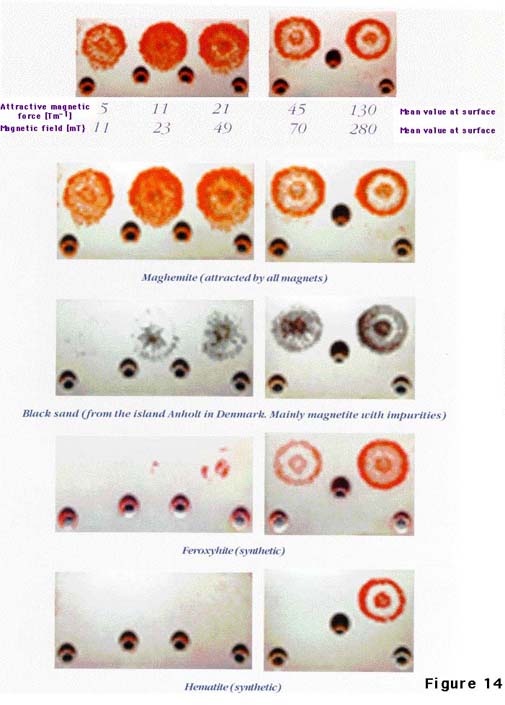
Magnetic
Properties of Martin Soil and Dust: The scientific goal of the
IMP Magnetic Properties Experiment, comprehensively described
here, is to identify the magnetic minerals in the martian
soil and airborne dust. Imaging the distribution of magnetic material
on the different strength magnets will be diagnostic of material's
mineralogy (Figure
14). Spectral images of the accumulated dust on these magnets
should provide diagnostic mineralogical identification of these
magnetic species. The magnets built into the rover deployment ramps
will put magnets in close proximity to the soil and allow the rover to
measure the accumulated magnetic dust with the Alpha Proton X-ray
Spectrometer. The magnet mounted on the camera tip plate is less than
10 cm from the camera windows and the IMP will use a diopter lens to
allow close-up viewing of this magnet. This magnet will collect
magnetic dust settling from the atmosphere and its proximity to the
camera will provide 200 µm per pixel resolution of the dust
grains. The dust grains are probably much smaller than 200 µm,
but the camera will be able to resolve chains that grains may form in
the magnetic force lines of the tip plate magnet. The morphology of
these chains can be diagnostic of the mineralogy of the magnetic
species.
Atmospheric Water Vapor and Dust: Atmospheric water vapor will
be measured by ratioing solar images through two narrow band filters,
one at the 0.935 µm water band and one on
the continuum at 0.925 µm. Additional solar
images using ratios of narrow band filters at 0.45 and 0.925 µm will provide data on the size distribution and
quantity of atmospheric dust. These measurements will be made at a
number of airmasses from zenith to the horizon to provide an hourly
history of water vapor, dust loading, and particle size variability
for each sol of the Pathfinder mission. The 12 different geology
filter wavelengths can be used to take multispectral sky images for
several applications. Sky brightness measured at various angles from
the Sun at multiple wavelengths can determine atmospheric particle
size and shape. As the sun sets, illumination is restricted to
progressively higher zones in the atmosphere and a series of
multispectral sky brightness measurements can give us a picture of the
vertical structure of the aerosols in the martian atmosphere. Finally
multispectral measurements of Phobos and its aureole can be used to
detect nighttime condensation and early morning fogs.
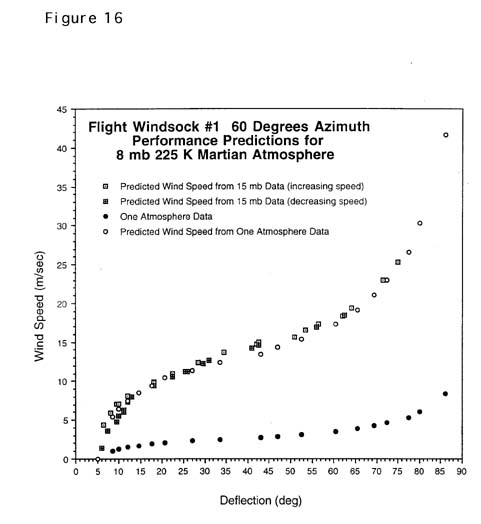
Wind Speed, Direction, and Gradient: The IMP Wind Sock
Experiment will measure the direction, speed, and the boundary-layer
velocity profile of the local martian wind by imaging the deflections
and azimuth of the socks. These measurements will allow us to
characterize the eolian processes at the Pathfinder landing site
including particle threshold and the aerodynamic surface
roughness. The socks will be imaged by the IMP every daylight hour to
provide a continuous record of wind parameters. The windsock images
will be sub-framed, processed on-board, and compressed to minimize the
downlink data requirements. The deflections of the socks under wind
velocities have been measured to provide quantitative data about the
wind speed (
Figure 16). The azimuth that the sock "points" indicates the
direction of the wind.
ALPHA-PROTON-X-RAY SPECTROMETER
Principal Investigator
The objective of the Alpha-Proton-X-ray Spectrometer (APXS) for the
Mars Pathfinder mission is to provide a complete and detailed chemical
elemental analysis of martian soil and rocks near the landing
site. The APXS technique is well established, and can measure all
major and minor elements except hydrogen. Because all other major
elements are determined to high accuracy, even H can often be
estimated from stoichiometry. We presently have only coarse soil
chemistry of Mars at the two Viking landing sites. Viking, however,
had no means of determining C, N, O, and Na which are vital to
understanding the history and the evolution of the planet, so the APXS
experiment will fill important gaps in our knowledge of Mars.
The primary focus of the APXS investigation is new measurements of the
chemistry of martian rocks. The APXS instrument is carried aboard the
Pathfinder microrover, which will provide transportation to places of
interest on the surface. The possibility to transport the APXS to an
arbitrary location, pre-selected on Earth, and to perform in-situ
analysis at it, constitutes one of the most exciting scientific
aspects of the Pathfinder mission. Chemical analyses of several rocks
at the landing site will therefore shed light on a variety of
important processes that have operated on Mars.
Measurement Techniques
The principle of the APXS technique is based on three interaction of
alpha particles from a radioisotope source with matter: (a) simple
Rutherford backscattering, (b) production of protons from reactions
with the nucleus of light elements, and (c) generation of
characteristic X-rays upon recombination of atomic shell vacancies
created by alpha bombardment.
Measurement of the intensities
and energy distributions of these three components yields information
on the elemental chemical composition of the sample. In terms of
sensitivity and selectivity, data are partly redundant and partly
complementary: Alpha backscattering is superior for light elements (C,
O), while proton emission is mainly sensitive to Na, Mg, Al, Si, S,
and X-ray emission is more sensitive to heavier elements (Na to Fe and
beyond). A combination of all three measurements enables determination
of all elements (with the exception of H) present at concentration
levels above typically a fraction of one percent.
APXS Data and Analyses
Martian Surface Soils and Rock Measurements: The APXS will analyze
at multiple rock and soil samples in the vicinity of the landing site. The
strategy is to obtain the first soil analysis right after the landing on
the first night on the surface. On the second day, after analyzing the images
of the landing site, an appropriate rock sample will be chosen and the rover
will be commanded to place the APXS to analyze it. Most of the time the
APXS will be operating during the night time, when there is no other activity
going on. Later in the mission, daylight measurements will be also performed
to see if there are any condensation processes happening during the night
time. Under nominal rover conditions, it may be possible to obtain a new
APXS spectrum every night during the first week of operation.
Magnetic Target Measurements: During operations on the surface
of Mars, the APXS will analyze many samples of martian soil and
rocks. It is, however, also anticipated that the APXS will analyze one
of the magnetic targets mounted on the rover ramps to provide
information about the magnetic properties of the martian surface
material. By analyzing the collected material with the APXS it will be
possible to determine if there is any preferential separation of the
collected material according to the magnetic properties of the
material. The spectra of the magnetic targets obtained will be
compared with the spectra of the soil as a whole ( and with
rocks). From these measurements, it is expected to determine some of
the iron mineralogy of the martian surface material.
Atmospheric Structure Instrument/Meterology Package
Science and Measurement Objectives.
The Atmospheric Structure Investigation/Meteorology (ASI/MET) experiment
is designed to obtain measurements of the martian atmosphere during the
entry, descent, and landed phases of the Mars Pathfinder mission. It has
been developed at JPL under the supervision of a Science Advisory Team (SAT)
with considerable experience in in-situ atmospheric measurements
and martian meteorology.
The overall scientific goals and measurement objectives of the investigation
during the Pathfinder spacecraft Entry, Descent, and Landing (EDL) are to
derive a vertical density, pressure and temperature structure profile for
the upper atmosphere from measurements of entry vehicle acceleration in
three orthogonal axis during the entry phase of the mission; derive a vertical
density, pressure and temperature structure profile for the lower atmosphere
from measurements of atmospheric pressure and temperature during the descent
phase of the mission; and to characterize boundary layer meteorology and
accumulate a climatological atmospheric data set at the Pathfinder landing
site using measurements of pressure, temperature and wind, during the landed
phase of the mission.
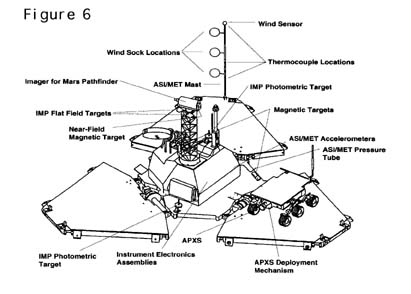
ASI/MET Sensors
The ASI/MET experiment is performed by accelerometer and meteorology
(MET) instruments using hardware distributed throughout the Pathfinder
lander (Figure 6). The
accelerometer instrument consists of three science and three
engineering accelerometers, with supporting electronics, mounted on
two boards in the Pathfinder Integrated Electronics Module (IEM). The
MET instrument consists of pressure, temperature and wind sensors and
a single IEM electronics board. The pressure sensor is mounted outside
the IEM, but within the lander thermal enclosure and is connected to
an aperture in the lander vehicle via a pitot tube. All the
temperature sensors and the wind sensor are mounted on a
meteorological mast 1 cm in diameter and 1.1 m high, which is deployed
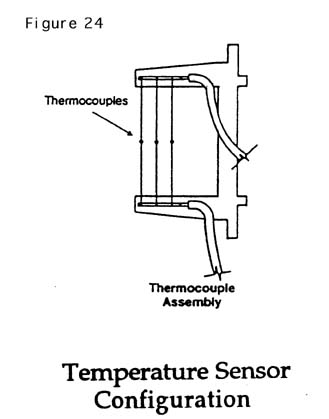
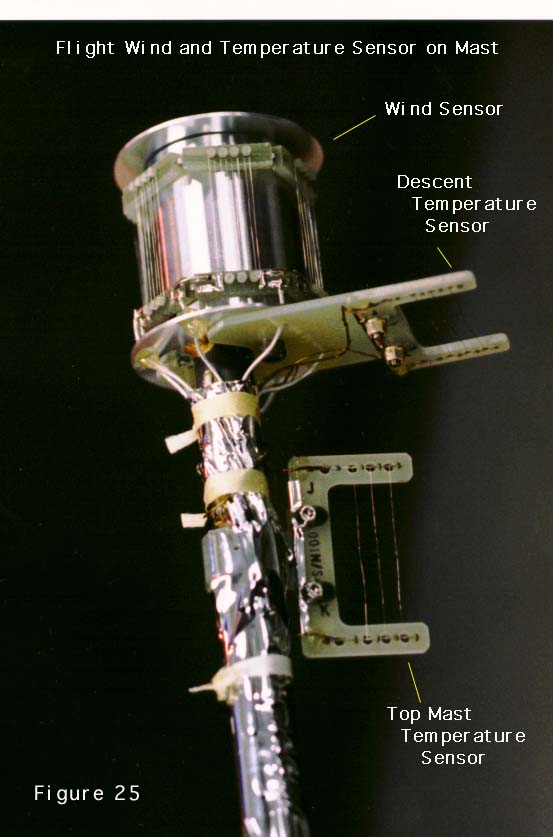
after landing. Temperature is measured by thin wire thermocouples, (Figure 24), mounted on a
meteorological mast that is deployed after landing.
(Figure 25) shows the top of
the mast which includes a thermocouple is positioned to measure
atmospheric temperature during descent, the wind sensor, and the top
of three more thermocouples to monitor atmospheric temperatures 25,
50, and 100 cm above the surface during the landed mission. The mast
base is located on the end of a lander petal to minimize the thermal
contamination of temperature and wind measurements by the
spacecraft. (In addition to pressure, temperature, and wind sensor
electronics, the MET board also carries the signal processing
electronics for the temperature sensors of the Aeroshell
Instrumentation Package (AIP).)
The Deep Space Network (DSN), by using two-way X-Band and doppler tracking of the Mars Pathfinder lander will be able to address a variety of orbital and rotational dynamics questions. Ranging involves sending a ranging code to the lander on mars and measuring the time required for the lander to echo the code back to the Earth-based station. dividing this time by the speed of light results in an accurate measurement (within 1-5 meters) of the distance from the station to the spacecraft. As the lander moves relative to the tracking station, the velocity between the spacecraft and Earth causes a shift in frequency (doppler shift). Measuring this frequency shift provides an accurate measurement of the distance from the station to the lander. Within a few months of observing these features, the Mars Pathfinder lander location can be determined within a few meters. Once the exact location of Pathfinder has been identified, the orientation and precession rate (regular motion of the pole with respect to the ecliptic) of the pole can be calculated and compared to measurements made with the Viking landers 20 years ago. Measurement of the precession rate allows direct calculation for the moment of inertia, which is in turn controlled by the density of the martian rock with depth. Measurements similar to these are used on earth to determine the makeup of the earth's interior.
NASA Lewis Research Center has been involved in the Mars Pathfinder Mission nearly from the beginning. The Mars Solar Energy Model (G. Landis and J. Applebaum) provided an early demonstration that sufficient solar energy is available at Mars to provide operating power for a spacecraft and lander. This solar energy model was incorporated into the computer model used by JPL to design solar arrays for the Pathfinder lander, and the Sojourner Rover. Since then, Lewis scientists have designed, built, and delivered hardware for three sensors incorporated onto the rover. Also delivered were several small tungsten points for removing electrostatic charge accumulated during rover surface operations.
The Material Adherence Experiment (MAE), will quantify how much dust settles out of the martian atmosphere. The Viking landers showed that the atmosphere of Mars contains a large amount of suspended dust. The MAE consists of two sensors. The first sensor is a solar cell (G. Landis and P. Jenkins) which will measure how much light is obscured from the cell by dust that settles on it. Results will show how opaque Mars dust is, and how rapidly it settles out of the martian atmosphere. The second sensor is a quartz crystal monitor (G. Hunter and L. Oberle) which will use a vibrating quartz crystal. An adhesive surface on the crystal accumulates the dust, and resultant changes in crystal frequency indicate its mass. Together, the two sets of measurements will provide excellent information on dust properties and deposition rates.
The Wheel Abrasion Experiment (WAE) will assess wheel wear (D. Ferguson and J. Kolecki). WAE uses atomically thin metal films deposited on black anodized aluminum strips attached to a rover wheel. A photocell monitors changes in film reflectivity as the rover moves and the surfaces wear. Twice each martian day, all the other rover wheels will be locked stationary while the test wheel alone is spun and allowed to dig into the martian surface. Marked abrasion will indicate a surface composed of hard, possibly sharply edged grains. Lack of abrasion would suggest a somewhat softer surface. WAE results will be correlated with ground simulations to determine which terrestrial materials behave most like Mars dust. This knowledge will enable a deeper understanding of erosion processes on Mars and the role they play in martian surface evolution. All of the above results will be significant to future Mars designs.
Rover electrostatic charging will be controlled by fine, tungsten points mounted on the rover antenna base (J. Kolecki and M. Siebert). Tests and calculations have confirmed the possiblity that the rover will accumulate a large static charge during its surface operations. (the charge is though to occur when the dry martian dust is compacted by the rover wheels.) Once this charge is accumulated, disruptive electrical discharges on our around the rover become possible. Since actual martian conditions are unknown, discharge points have been added to the rover as a precaution. If the rover accumulates electric charge, some, or all of it will be removed to the atmosphere through the discharge points. Atmospheric dust, blowing by the rover, will collect this charge, and eventually return it to the martian surface. Discharge currents through the points are predicted to be non-disruptive.
NASA Lewis Research Center overview of their contributions to the Pathfinder mission.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}