Virtual Sojourner
Student Activity #1: Driving Blind
Introduction

Photo courtesy NASA
The objective of this activity is for you to modify a
radio-controlled car or truck to perform a mission without
actually being there! This activity simulates a mission
Pathfinder's rover, Sojourner,
performed on Mars during the Summer of 1997. The mission will
also have implications to the Rocky7 rover suggested
for future
Mars missions.
This is the ultimate remote control
challenge--direct a mechanical device to perform a set of
operations without seeing what it is doing! --what
happened to Sojourner might happen to you!

Photo courtesy NASA
The Mission
The mission is to command your "rover" to move to a
specific location. Its job at this location is to perform an
experiment and record data.
Suggested procedure:
- View a video taped "panorama"
made by your teacher or the lander
team. The tape should be of a site that is not
familiar to anyone in class and has sand, pebbles, and
rocks.
- Choose, as a class, the mission objective--where the
rover is supposed to go and what it is supposed to do
there.
- Form teams for each component of
the mission.
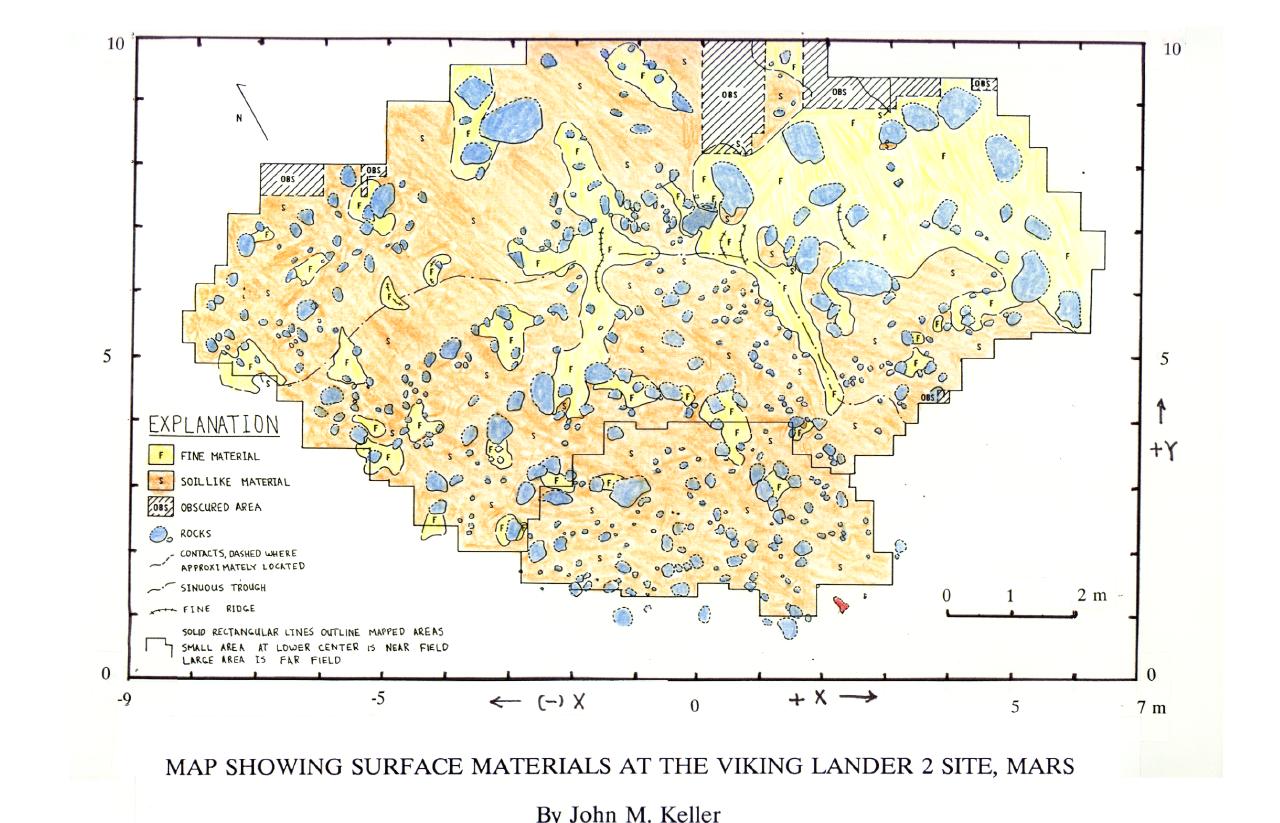
- Make a scale map of the site. Include major points of
interest and all obstacles. Click
here for an example taken from the Viking mission to
Mars in 1976.
- Plan a route for the rover. A detailed list of
instructions will be needed for the rover navigators--how
far for each movement forward, the angle for each turn,
etc.
- Modify a radio controlled car or truck to contain an
experiment and method of recording data. Experiments may
be meteorological (temperature, pressure, wind speed),
geological (soil magnetics, soil temperature, rock
composition), or biological (evidence of water or
"life"). This becomes your "rover."
- Practice navigating the rover using time as the
measure for each maneuver -- forward __?__ seconds, right
__?__ seconds, etc. Remember, you will not be able to see
the rover as it is moving!
- Execute the mission. Navigate the rover to its selected
location. Command it to perform the chosen experiment.
All commands are given "blind," that is, no one
may see the rover move. Information from the camera at
the site may be used to check positioning, BUT it must be
delayed at least a seven minutes after the last rover
command. Additional mapping and planning may be done, if
needed, as decided by the class.
- Report on the mission. Write a report on how the mission
went and what was learned. Publish your report, if you
like, to this Web site for
others to read. Make sure there is class consensus on
each answer before entering the report.
Ready, set, ...
- Read all instructions for the activity.
- Learn the responsibilities of the other teams.
- Follow the links above to learn more about the activity.
- Plan and execute your mission.
- Have fun!
{kind=link}
{kind=link}